
Дослідники розробляють інноваційного комахоподібного робота з висувними лапками. Він зможе досліджувати складну місцевість печер та лавових трубок на Місяці й навіть на Марсі.
«Це дуже цікаві місця для дослідження. Вони відносно закриті. Якщо є якісь ознаки минулого життя, це гарні місця для їх пошуку. До того ж якщо ми зрештою думаємо про людське житло, це добре місце, щоб побудувати собі укриття», – розповідає Марк Каткоскі, професор у галузі машинобудування.
Марсіанські печери — приваблива мета майбутніх досліджень Червоної планети. Люди поки не мають певного уявлення про їх структуру. Робот «Річбот» (ReachBot), створений Стенфордським університетом, призначений для адаптації до будь-якої печерної структури, у якій може опинитися.
«Мета — розробити робота, який зможе дістати доступ до екстремальних умов на інших планетах, таких як Марс або Місяць, куди зазвичай роботи не можуть потрапити», – наголошує Марко Павоне, доцент кафедри аеронавтики та астронавтики.
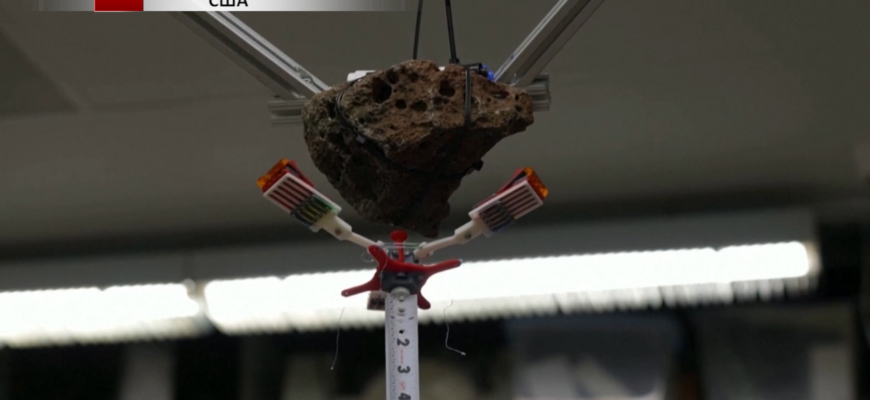
«Річбот» переміщатиметься подібно до павукоподібних, які мають невелике тіло та довгі лапи. Його захоплювачі можуть фіксуватися на кам’янистих поверхнях, що дає змогу роботу ефективно переміщатися в складних умовах.
«Щоб створити прототип “Річбота”, ми використали безліч рулеток, бо їхній функціонал майже ідентичний космічним захоплювачам», – каже Тоні Чень, розробник.
«Річбот» оснащений датчиками та сканером довкілля. Це дає йому змогу визначати доступні для захоплення об’єкти на кам’янистих поверхнях.
«Робот має проаналізувати всі можливості та всі невизначеності, щоб визначити ефективний та безпечний шлях. Для цього використовують різноманітні методи, зокрема штучний інтелект», – пояснює Марко Павоне, доцент кафедри аеронавтики та астронавтики.
Ефективність «Річбота» перевірили в пустелі Мохаве, що в Каліфорнії. Науковці кажуть, що його ще вдосконалюватимуть. У космосі він матиме безліч застосувань: від дослідження планет до місій на астероїди та супутники.







